动机
背景
- 为了进行有用的服务,机器人需要知道它在环境模型中的姿势
- 运动命令执行起来肯定是不准确的
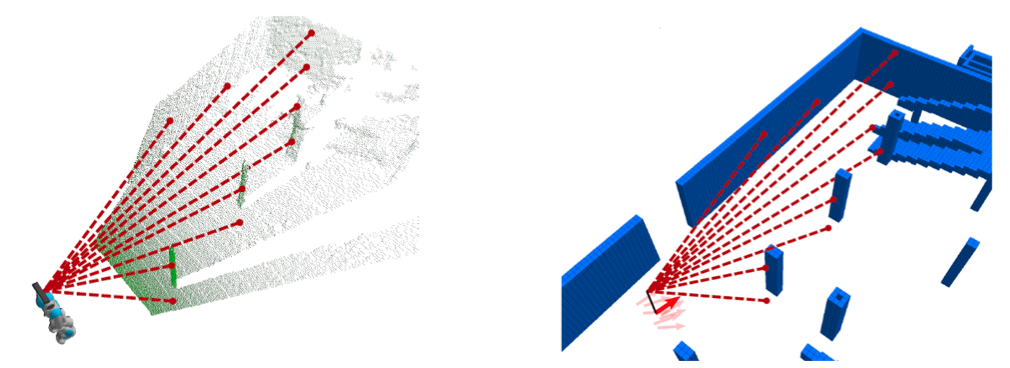
- 估计一个机器人在给定的环境三维模型中的(全局)姿态
- 基于其传感器数据和测距仪测量数据
- 传感器数据:深度图像或激光测距读数
问题描述
- 基于传感器的数据和测距仪Odometry的数据
- 估计机器人在3D环境模型中的全局姿态
需要用到一些概率论知识
- 贝叶斯定律 Bayes'rule
- 总概率法则 Law of total probability
- 马尔可夫决策假设 Markov Assumpution
状态估计
根据外部传感器的观察$z$和内部测距仪的测量数据$u$来估计机器人现在的状态$x$